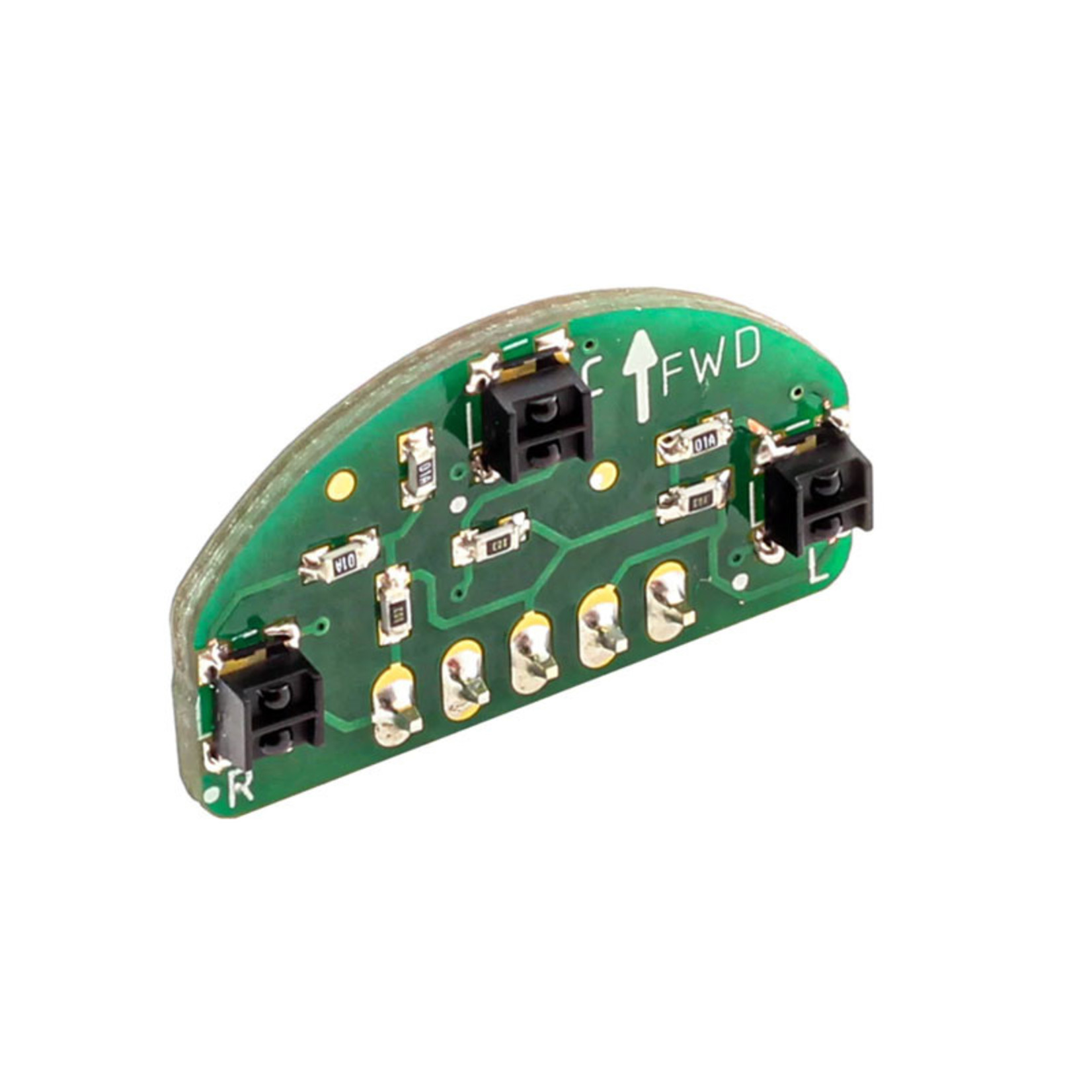
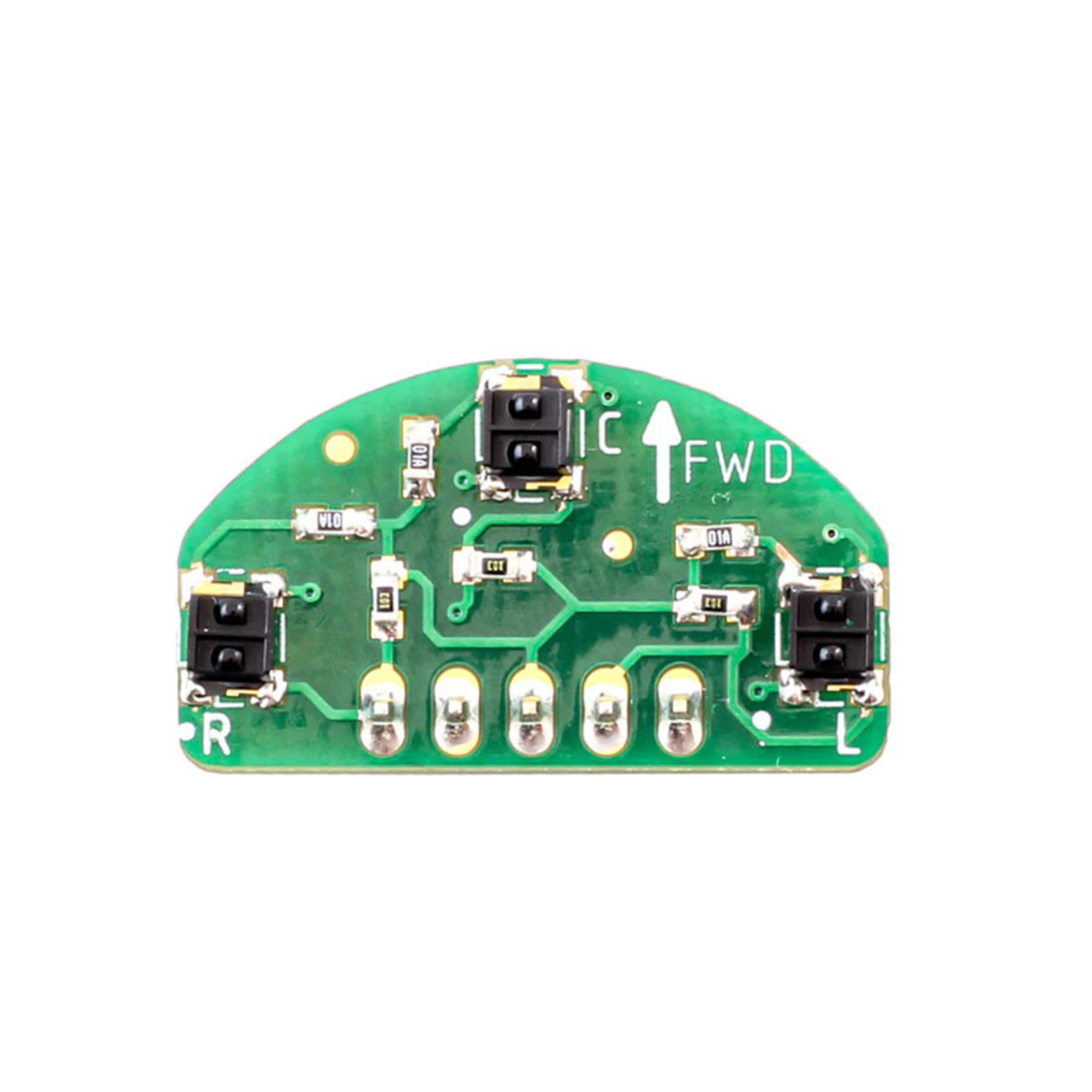
The Kitronik Autonomous Robotics Line following sensor board allows you to add line following to your robot/buggy projects. The board features 3 phototransistors that adjust the current flow depending on how much reflected light they detect. This results in an analogue output voltage that can be read into a microprocessor’s ADC channel, such as the Raspberry Pi Pico. It is also possible to use this board with other microprocessor platforms, such as the BBC micro:bit and Arduino. This board also features in the Kitronik Autonomous Robotics Platform for Raspberry Pi Pico.
The 5 pin connections are on a standard 0.1” (2.54mm) pitch pin header that will fit any standard prototype breadboard or strip-board. The pins provide connections for power (3v and 0V) and 3 sensor outputs, marked L, C, and R for the left, centre and right sensors respectively.
The board requires a 3V-5V supply (nominal 3.3V) and a ground connection onto the pin header. These pins are marked on the board as 3V and 0V. For more details on the pinouts see the Datasheet electrical information.
The sensor outputs a voltage that will change from the supply voltage to 0V. This change occurs when the sensors pass over light and dark surfaces. Different surfaces will reflect different amounts. A typical light surface will give a value of 0.5V for example. A typical dark surface will give a value of 2.5V (assuming a 3V VCC). The value in a program will depend on the processor's ADC range and width.
| Surface. |
Response. |
| Light. |
Low Voltage ˜ 0V |
| Dark. |
High Voltage ˜ 3V |
For an example of how to write code for this board, we have produced MicroPython example code, which you can find here. This MicroPython code has been written to demonstrate coding for the Raspberry Pi Pico. It is also possible to use this sensor board with an Arduino or a BBC micro:bit. For more information, please refer to the Datasheet.
Features:
- Add precise line following to your Robot/buggy projects.
- No Soldering is required.
- The pin connections are on a standard 0.1” (2.54mm) pitch pin header.
- Example MicroPython line following code for the Raspberry Pi Pico is provided on GitHub.
- This board is the same that features in the Kitronik Autonomous Robotics Platform for Raspberry Pi Pico.
- This board can be used in conjunction with Raspberry Pi Pico, Arduino, or micro:bit.
Contents:
- 1 x Kitronik Autonomous Robotics Platform - Line Follower Board
Dimensions:
- Length: 24.5mm.
- Width: 14.5mm.
- Height (without pins): 5.95mm.
- PCB Thickness: 1.6mm.
Video:
Requires:
- A microprocessor, such as; Raspberry Pi Pico, Arduino, or micro:bit.
Resources: